Example 3: Uncertainty-Aware SAC with Bayesian Neural Networks#
This example demonstrates how an Agent can be quickly adapted to use Bayesian Neural Networks (BNNs). We’ll use Soft Actor-Critic (SAC) as our example and replace its critics with BNNs to quantify epistemic uncertainty in value function estimation.
Bayesian Neural Networks in ObjectRL#
ObjectRL contains implementations for a wide range of Bayesian layers, all assuming mean-field variational inference.
The implemented methods are:
Bayes by Backprop: Samples weights during every forward pass [1]
Local Reparameterization: Reduces gradient variance by sampling activations [2]
Central Limit Theorem Approximation: Computes an analytical approximation of the post-activation output for piecewise linear activation functions and propagates their mean and variance [3] [4]
All methods are implemented in bayesian_layers.py and can be used directly via the BayesianMLP class.
Implementation#
Implementing a BNN-SAC algorithm follows these four steps:
Implement the agent in
modelsand add it to theget_modelfunctionImplement the BNN critic network architecture
Create configuration classes for the new agent
Add the final config to
config/model_configs
1. The BNN-SAC Agent#
Since BNN-SAC is simply SAC with a different critic network architecture, BNNSoftActorCritic is a straightforward subclass of SoftActorCritic:
from objectrl.models.sac import SACCritic, SACActor, SoftActorCritic
class BNNSoftActorCritic(SoftActorCritic):
"""
BNN-Soft Actor-Critic agent with BNN-Critic ensemble
"""
_agent_name = "BNN-SAC"
def __init__(
self,
config: "MainConfig",
critic_type=SACCritic,
actor_type=SACActor,
):
"""
Initializes SAC agent.
Args:
config (MainConfig): Configuration dataclass instance.
critic_type (type): Critic class type.
actor_type (type): Actor class type.
"""
super().__init__(config, critic_type, actor_type)
Adding it to the get_model function:
case "bnnsac":
return BNNSoftActorCritic(config, critic.critic_type, actor.actor_type)
2. The BNN Critic Ensemble#
A BNN-based critic requires a new BNNCriticNet class with the following key changes from CriticNet:
Replace
MLPwithBayesianMLPusing local reparameterization ('lr') layersAdd functionality to switch between maximum a posteriori (MAP) prediction and sampling (for completeness; we won’t use it in this case study)
Maintain single sample forward passes for computational efficiency
class BNNCriticNet(nn.Module):
"""
A Bayesian Critic Network (Q-network).
Args:
dim_state (int): Observation space dimension.
dim_act (int): Action space dimension.
depth (int): Number of hidden layers.
width (int): Width of each hidden layer.
act (Literal["relu", "crelu"]): Activation function to use.
has_norm (bool): Whether to include normalization layers.
"""
def __init__(
self,
dim_state: int,
dim_act: int,
depth: int = 3,
width: int = 256,
act: Literal["relu", "crelu"] = "relu",
has_norm: bool = False,
) -> None:
super().__init__()
# A BNN with local-reparameterization layers
self.arch = BayesianMLP(
dim_in=dim_state + dim_act,
dim_out=1,
depth=depth,
width=width,
act=act,
has_norm=has_norm,
layer_type="lr",
)
self._map = False
def map(self, on: bool = True) -> None:
"Switch maximum a-posteriori mode on/off"
self._map = on
for layer in self.arch:
if hasattr(layer, "_map"):
layer.map(on)
def forward(
self, x: torch.Tensor
) -> torch.Tensor | tuple[torch.Tensor, torch.Tensor | None]:
"Forward pass of the BNNCriticNet"
return self.arch(x)
3. The configuration#
The configuration setup requires three components:
Actor Config: Reuse
SACActorConfigsince the actor remains unchangedCritic Config: New configuration pointing to our
BNNCriticNetMain Config: Inherits from
SACConfigwith updated components
from dataclasses import dataclass, field
from objectrl.config.model_configs.sac import SACActorConfig, SACConfig
from objectrl.models.sac import SACCritic
from objectrl.nets.critic_nets import BNNCriticNet
BNNSACActorConfig = SACActorConfig
@dataclass
class BNNSACCriticConfig:
"""
Configuration for the BNN-SAC critic network ensemble.
Attributes:
arch (type): Neural network architecture class for the critic.
critic_type (type): Critic class type.
"""
arch: type = BNNCriticNet
critic_type: type = SACCritic
@dataclass
class BNNSACConfig(SACConfig):
"""
Main BNN-SAC algorithm configuration class.
Attributes:
name (str): Algorithm identifier.
loss (str): Loss function used for critic training.
policy_delay (int): Number of critic updates per actor update.
tau (float): Polyak averaging coefficient for target network updates.
target_entropy (float | None): Target entropy for automatic temperature tuning.
alpha (float): Initial temperature parameter.
actor (SACActorConfig): Actor configuration.
critic (SACCriticConfig): Critic configuration.
"""
name: str = "bnnsac"
actor: BNNSACActorConfig = field(default_factory=BNNSACActorConfig)
critic: BNNSACCriticConfig = field(default_factory=BNNSACCriticConfig)
Running Experiments#
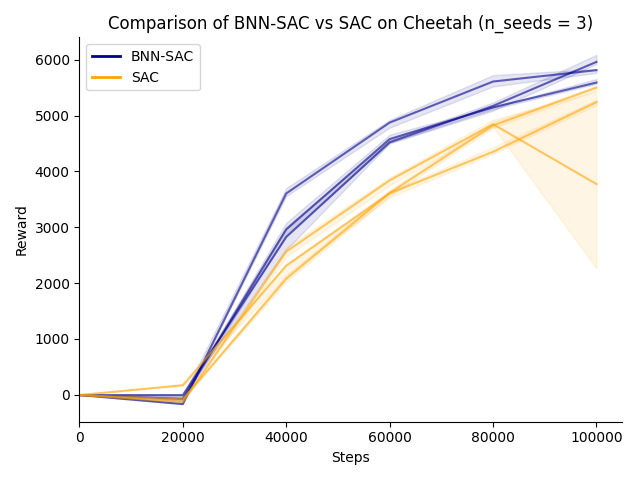
We’ll compare SAC with BNN-SAC by training both algorithms for 100,000 steps on the HalfCheetah environment:
Standard SAC:
python objectrl/main.py --model.name "sac" --env.name "cheetah" --training.max-steps 100000
BNN-SAC:
python objectrl/main.py --model.name "bnnsac" --env.name "cheetah" --training.max-steps 100000
Results#
Repeating this experiment over three seeds (–system.seed {1..3}) gives the following result. Each run is evaluated for ten episodes every 20k steps. Plotted are the median over each of these together with the upper and lower quartiles. The simple switch from deterministic critics to BNN-based critics provides a clear improvement.
Future Extensions#
Given the object oriented framework, this example can be extended in a straightforward manner to explore, e.g.,
- Enhanced Posterior Sampling
Instead of single samples, leverage the full variational posterior distribution by:
Implementing ensemble-based critics that sample multiple times
Creating a new
BNNSACCriticclass that aggregates uncertainty estimatesUsing Thompson sampling for exploration based on posterior uncertainty
- Bayesian Actor Networks
Extend uncertainty quantification to the policy:
Implement
BNNSACActorwith Bayesian policy networksEnable uncertainty-aware action selection
Combine epistemic and aleatoric uncertainty for robust policies
- Advanced Uncertainty Integration
Sophisticated uncertainty utilization:
Information-theoretic exploration bonuses
Risk-sensitive policy optimization
Adaptive learning rates based on uncertainty estimates
References